🏷️ LIMITED TIME OFFER: GET 20% OFF GRADE+ YEARLY SUBSCRIPTION →
Pricing
Log in
Sign up
Home
Homework Help
Study Guides
Class Notes
Textbook Notes
Textbook Solutions
Booster Classes
Blog
Home
Class Notes
1,200,000
CA
670,000
MATH 1107 Lecture : Lesson 9b -Homogenous Systems ^ Particular Solution.pdf
36
views
4
pages
sangriarabbit622
2 Mar 2014
School
Carleton University
Department
Mathematics
Course
MATH 1107
Professor
all
Like
For unlimited access to Class Notes, a
Class+
subscription is required.
Get access
Yearly
Monthly
Yearly
Grade+
20% off
$8
USD/m
$10 USD/m
Billed $96 USD annually
Homework Help
Study Guides
Textbook Solutions
Class Notes
Textbook Notes
Booster Class
40 Verified Answers
Class+
$8
USD/m
Billed $96 USD annually
Homework Help
Study Guides
Textbook Solutions
Class Notes
Textbook Notes
Booster Class
30 Verified Answers
Continue
Related textbook solutions
Calculus
4 Edition,
Rogawski
ISBN: 9781319050733
Single Variable Calculus: Early Transcendentals
4th Edition, 2018
Stewart
ISBN: 9781337687805
CALCULUS:EARLY TRANSCENDENTALS
4 Edition,
Rogawski
ISBN: 9781319050740
Related Documents
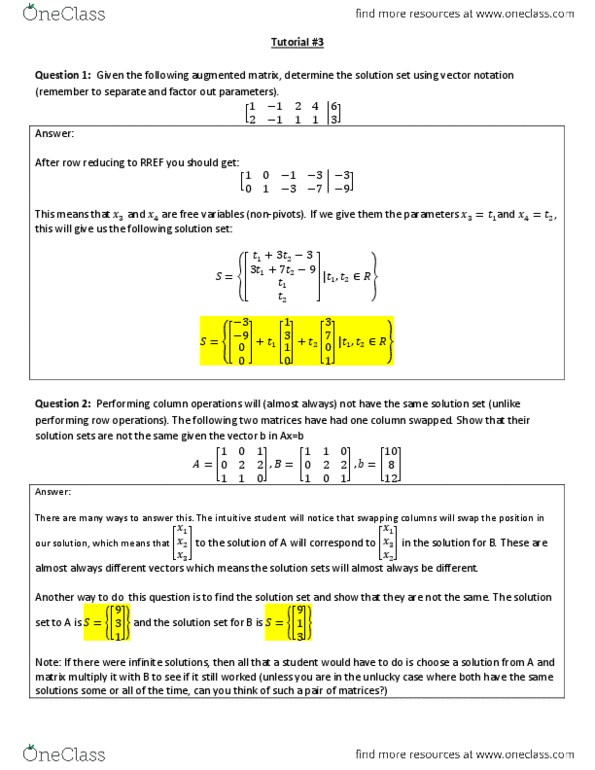
MATH 1107 Lecture : Tutorial 3 - Solutions.pdf
sangriarabbit622
MATH 1107 Lecture : Lesson 16b - Important Spaces.pdf
sangriarabbit622
MATH1503 Chapter Notes - Chapter 1-8: Row Echelon Form, Invertible Matrix, Elementary Matrix
skybee806