PSYC 2390 Study Guide - Sound Intensity, Transient Response, Stapedius Muscle

25 Mar 2013
School
Department
Course
Professor



Document Summary
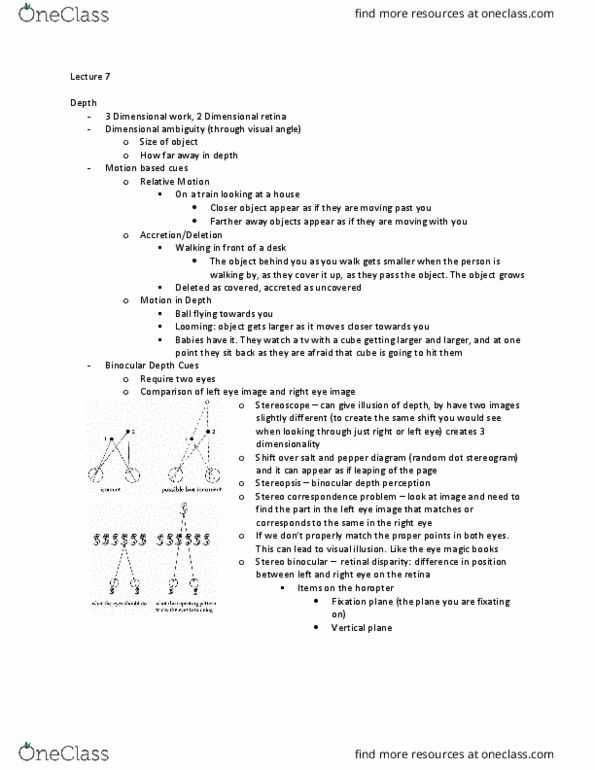
Sensation and perception notes for final exam 3/21/2013 9:40:00 am. Tricky to get depth information because we have a 3d world (distal stimulation), but the information we receive on the back of the retina is only 2d. Proximal cue = visual angle actual size or how far away in depth an object is: dimensional ambiguity. Can create sense of 3-dimensionality by having 2 images that are just slightly different. When you look at the images so one eye sees one side and the other sees the other, you will see a square floating over another square. Different views in different eyes; as a result, you see a square floating up. How do i match things on one eye with the other. Need find the thing on one eye that matches with the same thing on the other eye s image. Find corresponding parts in left and right eye images.