PSYB51H3 Study Guide - Midterm Guide: Binocular Disparity, Frontal Eye Fields, Superior Rectus Muscle

Document Summary
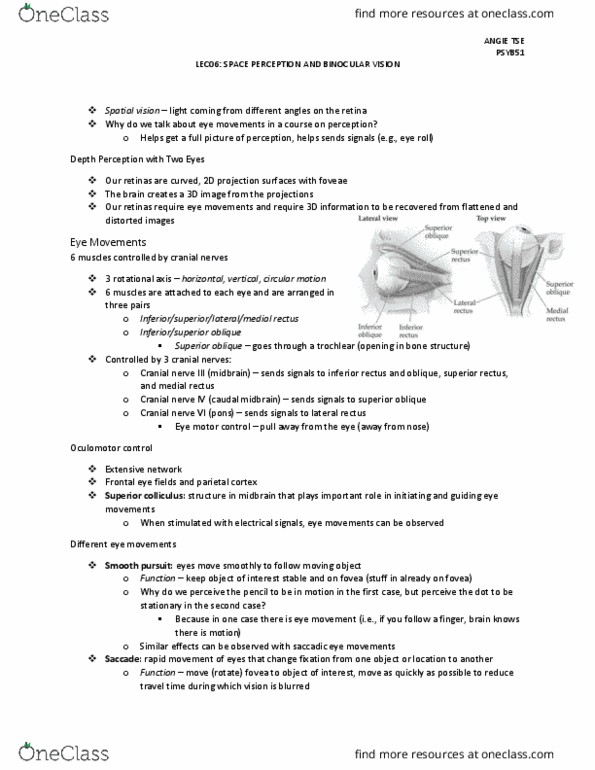
6 muscles controlled by cranial nerves: superior rectus, lateral rectus, medial rectus. Inferior rectus: superior oblique goes thru the hook-like structure (trochlea) 3 cranial nerves: #3-occulomotor nerve: does most of the job; in the midbrain (works ipsilaterally, #4-trochlear nerve: innovates the superior oblique (works contralaterally, #6-abducens nerve: innovates the lateral rectus (works ipsilaterally) Frontal eye fields & parietal cortex: frontal eye fields and parietal cortex projects onto the superior colliculus, eye movements are controlled by cerebral cortex, superior colliculus: structure in midbrain; initiates and guides eye movements. Types of eye movements: smooth pursuit: movement of eyes of a moving object, saccades: rapid movements of eyes to fixating points, vergence: eye movement where two eyes move in opposite directions; convergence/divergence. We don"t notice this b/c of spatial constancy. Binocular depth cues provide: convergence gives us an additional sense of depth, stereopsis, ability to see more of an object with both eyes than one eye.