EXSS2029 Lecture 9: Week 9 Notes

4 Sep 2018
School
Department
Course
Professor
Document Summary
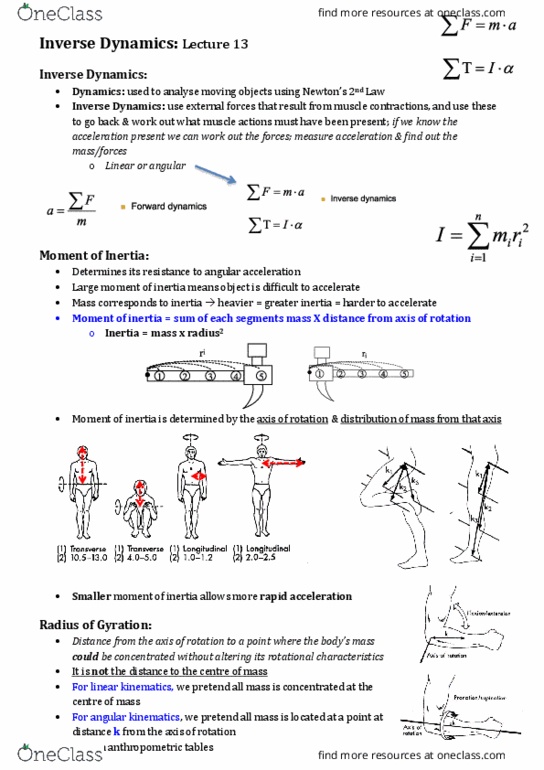
Inverse dynamics: used to analyse objects not in equilibrium, using external forces that result from muscle contractions (to work out what muscles are in use) > sum of forces = mass x acceleration. > sum of torques = moment of inertia x angular acceleration. Moment of inertia: resistance to angular acceleration (difficulty to accelerate) Depends on axis of rotation and distribution of mass away from axis (length) Smaller moment of inertia = rapid acceleration. Radius of gyration: dista(cid:374)(cid:272)e fro(cid:373) a(cid:454)is of rotatio(cid:374) to a poi(cid:374)t where (cid:271)od(cid:455)"s (cid:373)ass (cid:272)ould (cid:271)e concentrated without altering rotational characteristics. Calculate forces first > then jrf, whos torques act about com. Work in segments (eg. foot > shank > thigh) by drawing free body diagrams one by one (linked segments) Need: linear/angular accelerations, x and y distances between joint to com, mass/weight and moment of inertia of each segment (from film and tables)