PHYS1001 Lecture Notes - Lecture 16: Wavenumber, Damping Ratio, Point Particle


λ
k
dt
dt
T
Waves and Oscillations
Simple Harmonic Motion
Equations
- With a spring, the force is proportional to the displacement
- Fx = -kx
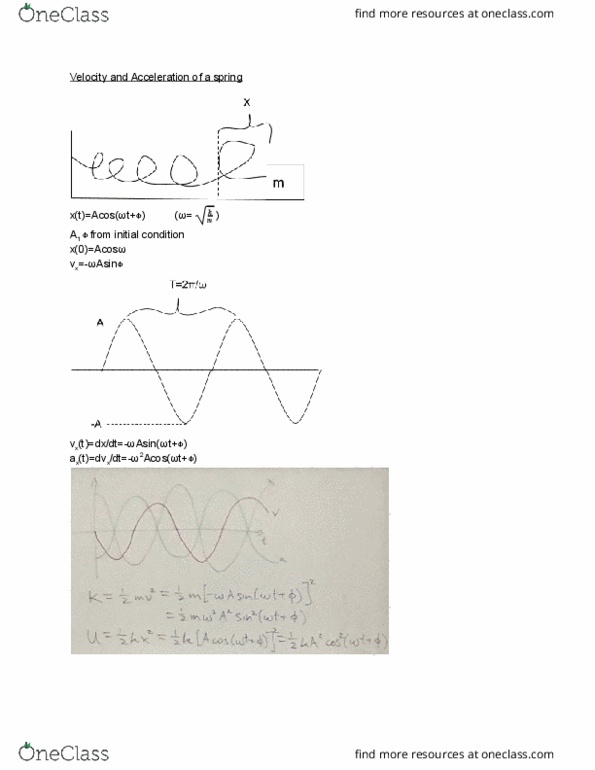
- x(t) = Acos(ωt + ϕ)
√m
- ω = k
- k = 2π
- T = 2π√m
- vx = dx =− ωAsin(ωt + ϕ)
- ax = dvx =− ω2Acos(ωt + ϕ)
- E = 1mv2 + 1kx2 = 1kA2
2 2 2
- vx = ω√A2 − x2
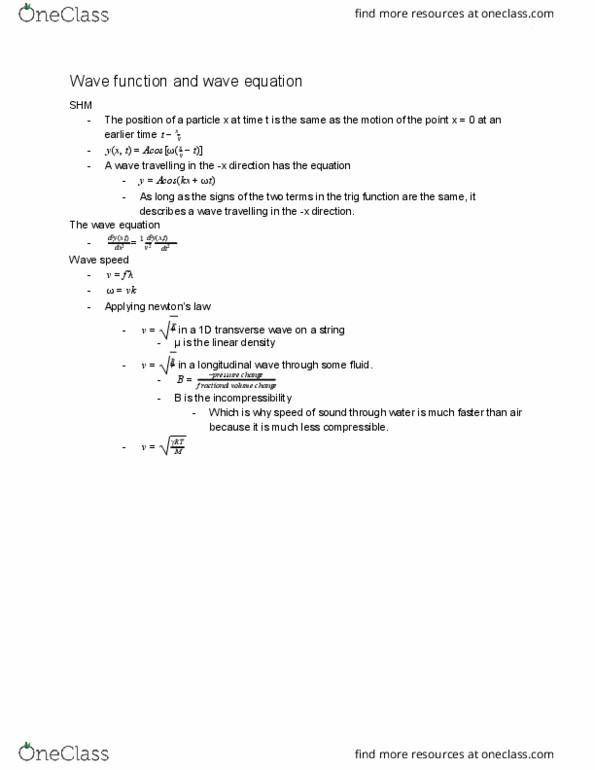
- v = f λ
- ω = vk
SHM
- Phi represents the phase angle, this is the initial position.
- It’s important to remember that a single wave can’t have a phase, phase only
occurs when we compare how out of sync 2 separate waves are. In this case, we
compare it to a wave that passes through the origin and travels in the positive
direction.
- We can describe a wave in terms of its amplitude, frequency, and angular frequency.
- Simple harmonic motion is one case of periodic motion - periodic motion such as a
heartbeat or a combustion engine.
- Oscillation is caused by a force that changes magnitude with position in such a way that
the motion becomes periodic - such as a spring.
- The period and frequency are inversely related.
- f = 1
- Also, ω = 2πf
- In SHM as with all mechanics, the acceleration is the derivative of velocity, which is the
derivative of the position
SHM and circular motion
- We can observe the components of circular motion as SHM, for example if you project
circular motion on the X-axis, it will give SHM.
Hanging Springs