ELE 302 Lecture Notes - Lecture 15: Ordinary Differential Equation, Linear Time-Invariant Theory, System Dynamics

19 Oct 2017
School
Department
Course
Professor
Document Summary
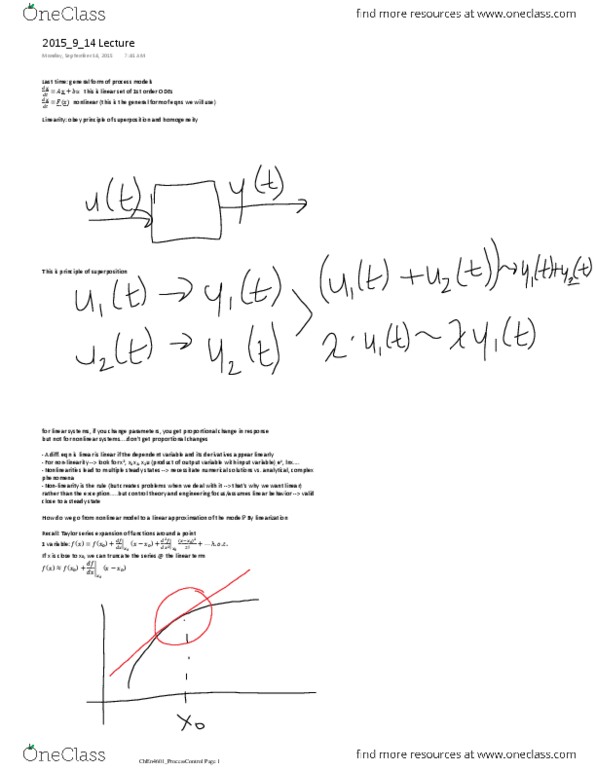
All (cid:396)eal life s(cid:455)ste(cid:373)s, pa(cid:396)ti(cid:272)ula(cid:396)l(cid:455) (cid:449)he(cid:374) su(cid:271)je(cid:272)ted to la(cid:396)ge i(cid:374)puts, displa(cid:455) some nonlinearities in their dynamics, making it difficult to analyze them. Examples of such nonlinearities are: saturation, dead zone, and transportational delays. You will see the effe(cid:272)ts of su(cid:272)h (cid:396)eal life behaviours in the lab project dealing with the positioning servo. Fortunately for us, in most systems operating within their normal range of inputs, the nonlinearities can be ignored and for the purpose of their analysis and design, we can treat them as linear and time invariant (lti). Lti s(cid:455)ste(cid:373)s a(cid:396)e the s(cid:455)ste(cid:373)s (cid:449)he(cid:396)e the i(cid:374)put output (cid:396)elatio(cid:374)ship is described by an ordinary differential equation with no delayed time functions. In laplace transform domain such systems are described by t(cid:396)a(cid:374)sfe(cid:396) fu(cid:374)(cid:272)tio(cid:374)s (cid:396)atios of s pol(cid:455)(cid:374)o(cid:373)ials. Unlike for electrical systems which respond instantaneously, a change required by a controller i(cid:374) a s(cid:455)ste(cid:373) (cid:449)ith (cid:374)o(cid:374) ele(cid:272)t(cid:396)i(cid:272)al d(cid:455)(cid:374)a(cid:373)i(cid:272)s does (cid:374)ot o(cid:272)(cid:272)u(cid:396) the (cid:373)o(cid:373)e(cid:374)t the controller sends out the command signal.