MATH 250 Lecture Notes - Damping Ratio, The Roots, Quasiperiodic Function

Document Summary
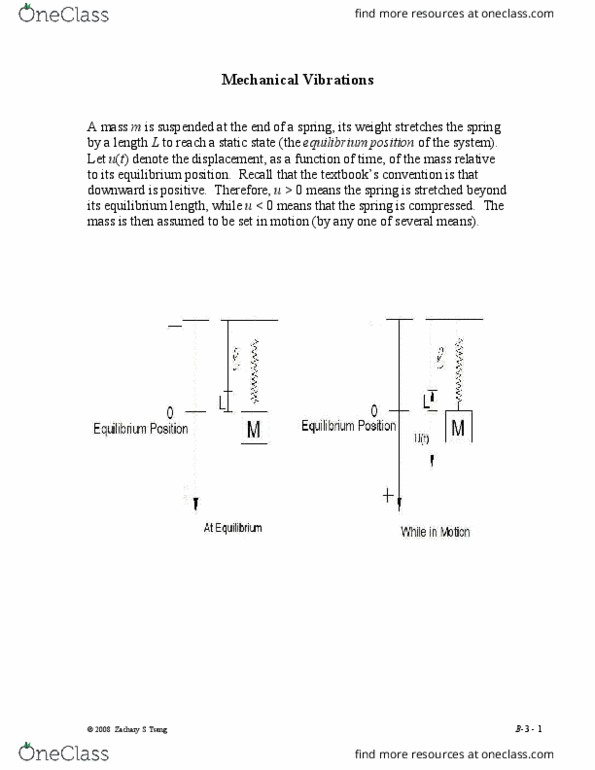
A mass m is suspended at the end of a spring, its weight stretches the spring by a length l to reach a static state (the equilibrium position of the system). Let u(t) denote the displacement, as a function of time, of the mass relative to its equilibrium position. Recall that the textbook"s convention is that downward is positive then, u > 0 means the spring is stretched beyond its equilibrium length, while u < 0 means that the spring is compressed. The mass is then set in motion (by any one of several means). At equilibrium: (by hooke"s law) mg = kl. While in motion: m u + u + k u = f(t) This is a second order linear differential equation with constant coefficients. It usually comes with two initial conditions: u(t0) = u0, and u (t0) = u 0. Summary of terms: u(t) = displacement of the mass relative to its equilibrium position. m = mass.