MTH 254 Study Guide - Midterm Guide: Unit Circle, Unit Vector, Cross Product

27 Apr 2018
School
Department
Course
Professor

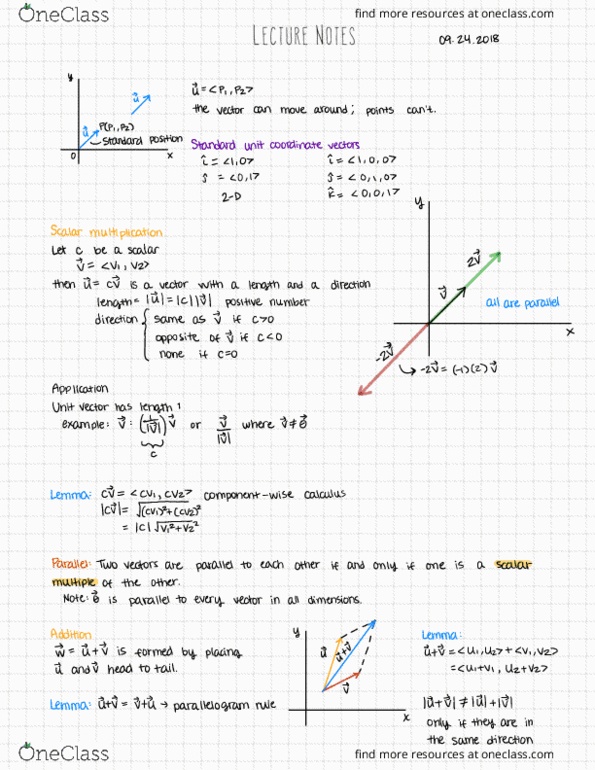
11.1 VECTORS IN 2D
A vector is a mathematical quantity that has a direction and length
(magnitude), and is represented by arrows. This is true for all vectors
except the zero vector.
This is the vector P Q
→
P is the tail of the vector and Q is the head of the
vector
The arrow points in the direction of the vector
If P and Q are the same point, then is a zero vector P Q
→(0)
→
Note: The zero vector is not equivalent to zero, it is its own vector
A position vector has its tail at the origin (denoted by the letter ‘O’)
Vectors are the same no matter where you put the tail (if they have the
same magnitude and direction)
Vectors are useful for representing things without ordinary numbers which
can only describe length but not direction like force, displacement, velocity,
etc.
Vector Addition
Geometric addition: place vectors tail
to head
Remember that you can move the
tail of the vector and as long as it has
the same magnitude and direction, it
will be the same vector.

Scalar Multiplication If is a vector and and is a scalar (number)v
→=λ / 0
then has the same or opposite direction as but its magnitude/length isvλv
multiplied by λ
| |
Figure 1: λ = 2
Figure 2: λ = 3
Algebraic Addition
If and , then ,v
→= < v1v2> ,w
→= < w1w2> ,v+w
→= < v1+w1v2+w2>
Note: use round brackets for coordinates, and angular brackets for vector
components
Example 1: Compute PQ using algebraic vector addition
PQ = PO + OQ
PQ = OQ - OP
PQ = < -1,2 > + -1< 2,1 >
PQ = < -1,2> + < -2,-1>
PQ = < (-1-2),(2-1)>
PQ = < -3,1 >
Magnitude/length of a vector is computed by the formula:
v
|
|
→|
|=√(v)v)
12+ ( 22

11.2 VECTORS IN 3D
Vector Operations in 3D
If and , ,a
→= < a1a2a3> , ,b
→= < b1b2b3>
then and b b ,a b ,a ba
→± →= <a1± 1 2± 2 3± 3>a a , λa , a λ →= < λ 1
→
2
→λ1
→>
are coordinate unit vectors and do not go inside angular brackets , j,ki
→ → →
is a coordinate unit vector of length one in the direction of the x axisi
→
is a coordinate unit vector of length one in the direction of the y axisj
→
is a coordinate unit vector of length one in the direction of the z axisk
→
can be expressed as , ,a
→= <a1a2a3>a i , j , ka
→= 1
→ a2
→ a3
→
Velocity Vectors
Example: The water in a river flows Southwest at 4 mph ( ) and a boat inw
→
a current is going due East at 15 mph relative to the ground v)( g
→
What is the velocity of the boat relative to the current? v)( w
→
15 , 0v
g
→= < >
because the4 cos(45), 4 sin(45)w
→= < >
angle between and the y axis is 45 degreesw
→
So 2 , 2w
→= < √2 √2 >
so v w g
→+ v
w
→= → v w w
→= →−v
g
→
2 , 2 ,v
w
→= < √2 √2 > − < 4 0 >
2 , v
w
→= < 4 − √2 − 2√2 >