🏷️ LIMITED TIME OFFER: GET 20% OFF GRADE+ YEARLY SUBSCRIPTION →
Pricing
Log in
Sign up
Home
Homework Help
Study Guides
Class Notes
Textbook Notes
Textbook Solutions
Booster Classes
Blog
Home
Study Guides
420,000
CA
160,000
PSY280H1 Study Guide - Smooth Pursuit, Fusional Language, Lateral Rectus Muscle
76
views
8
pages
fuchsialouse5
12 Dec 2012
School
UTSG
Department
Psychology
Course
PSY280H1
Professor
Matthias Niemeier
Like
For unlimited access to Study Guides, a
Grade+
subscription is required.
m4cle4ngoodf3llow
and
39493 others
unlocked
13
PSY280H1 Full Course Notes
Verified Note
13 documents
Get access
Yearly
Monthly
Yearly
Grade+
20% off
$8
USD/m
$10 USD/m
Billed $96 USD annually
Homework Help
Study Guides
Textbook Solutions
Class Notes
Textbook Notes
Booster Class
40 Verified Answers
Continue
Related Documents
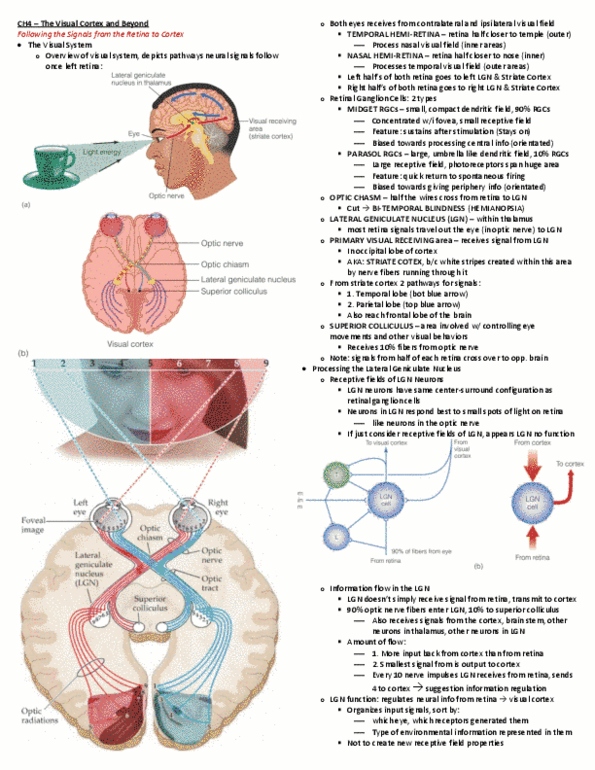
PSY280H1 Chapter Notes - Chapter 4: Visual Cortex, Retinal Ganglion Cell, Receptive Field
jadesalmon784
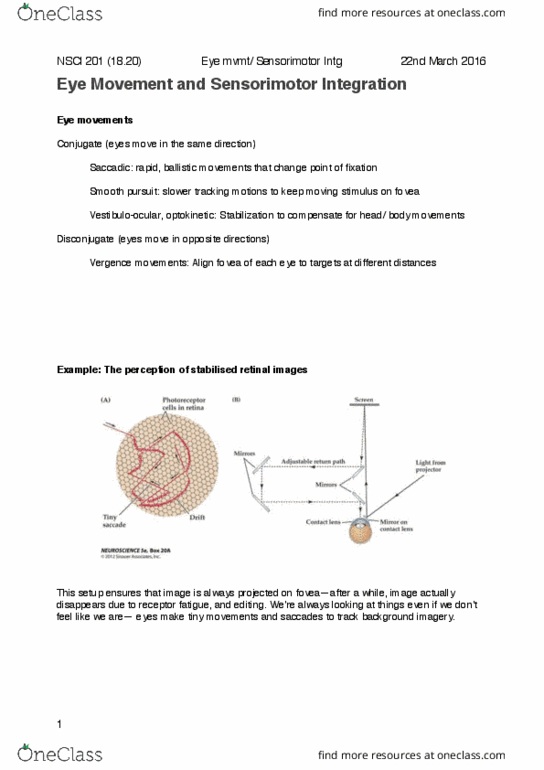
NSCI 201 Chapter Notes - Chapter 20: Cranial Nerve Nucleus, Medial Rectus Muscle, Extraocular Muscles
plummammoth350
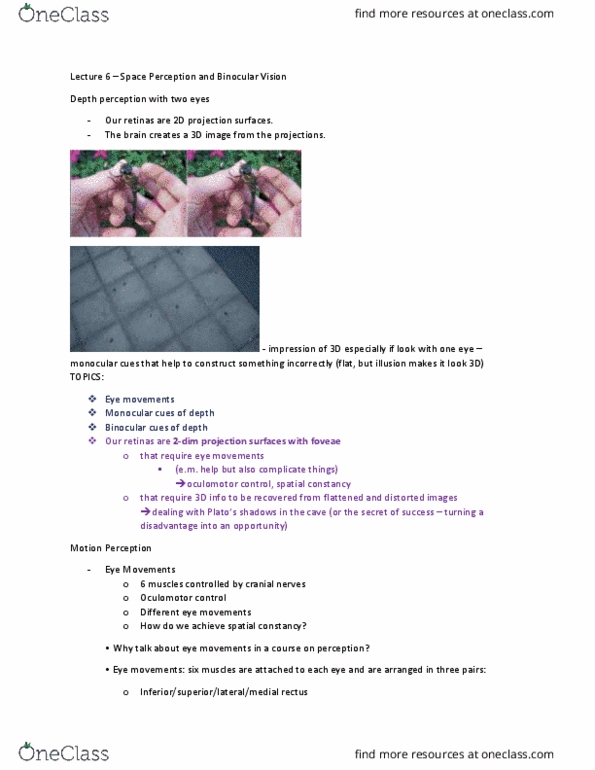
PSYB51H3 Lecture 6: Lecture 6
limedeer437