NROC64H3 Lecture Notes - Lecture 7: Vergence, Medial Dorsal Nucleus, Motor Cortex

19 Oct 2013
School
Department
Course
Professor
Document Summary
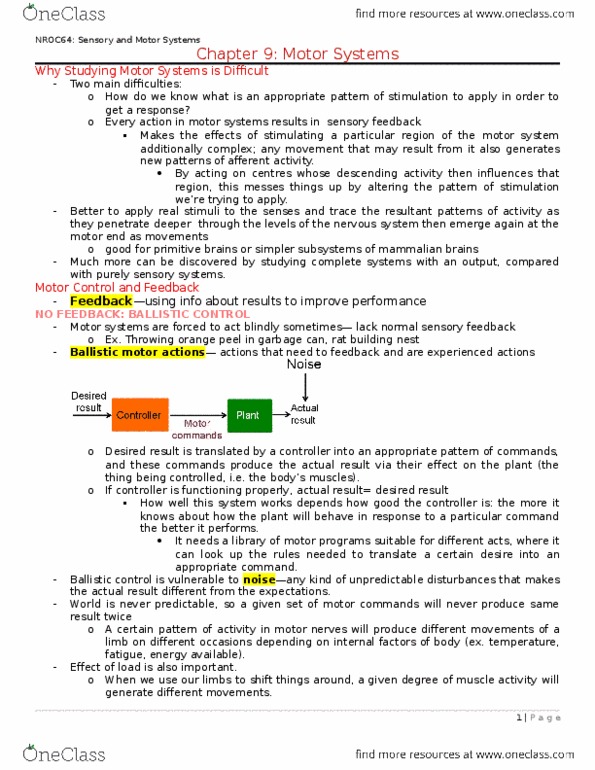
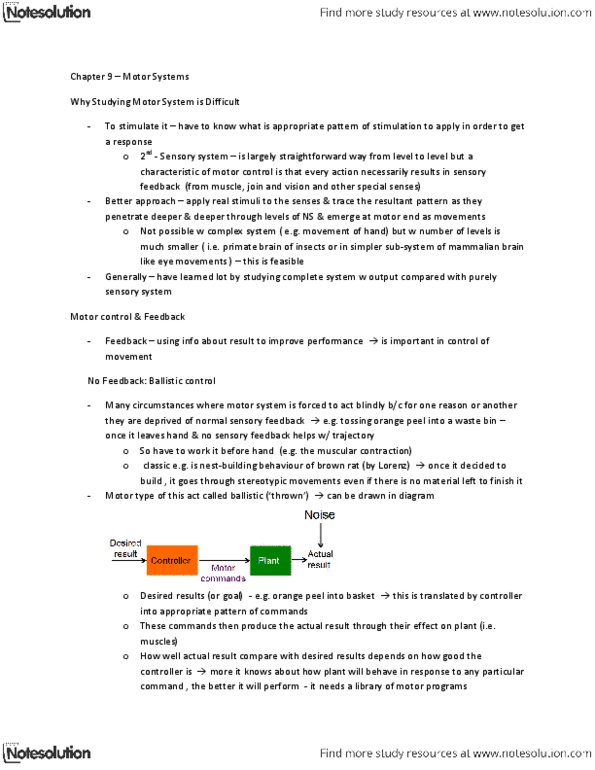
Overview: challenges of motor control research, feedback for motor control, efference copy, descending spinal tracks, hierarchy of motor control. Challenges of motor control research: no motor control without sensory feedback i. e. motor control can"t be studied in isolation. Infinitely many possible sources of noise: parametric feedback, comparator, actual result vs desired result. Summary of feedback for motor control: gaze holding, conjunction, optokinetic, vor, gaze shifting, conjunction, saccades, smooth pursuit, disjunction, vergence, spontaneous, drift, microsaccades, tremor. Overview of efference copy: synthetic sensory signal derived from motor command, feedback for motor control, feedback for perception, the problem of spatial stability across saccades, a neural pathway for efference copies (corollary discharge) Intermediate layers of sc (superior colliculus) medial dorsal nucleus of the thalamus fef (frontal eye field: supporting evidence, pathway is associated with shifting rfs (receptive fields) in fef, signal is appropriate, necessary.