NROC64H3 Chapter Notes - Chapter 9: Motor System, Comparator, Saccade

24 Nov 2015
School
Department
Course
Professor

!"
o#""$""%
&
o'(%)$
$ * % %
+,(%
"%*(-
."(/
0 ) %
"1-
.%(
(%(
(
o%())%)
)()"0
"-
2)$
Feedback3%)(%
NO FEEDBACK: BALLISTIC CONTROL
%)3$%)$
o'+-!")0)
Ballistic motor actions3%)$+
o)%0
(*4
)0--)15-
o6%%07
#"""$"
$")"")(
)%-
6)%)%*0"
$
-
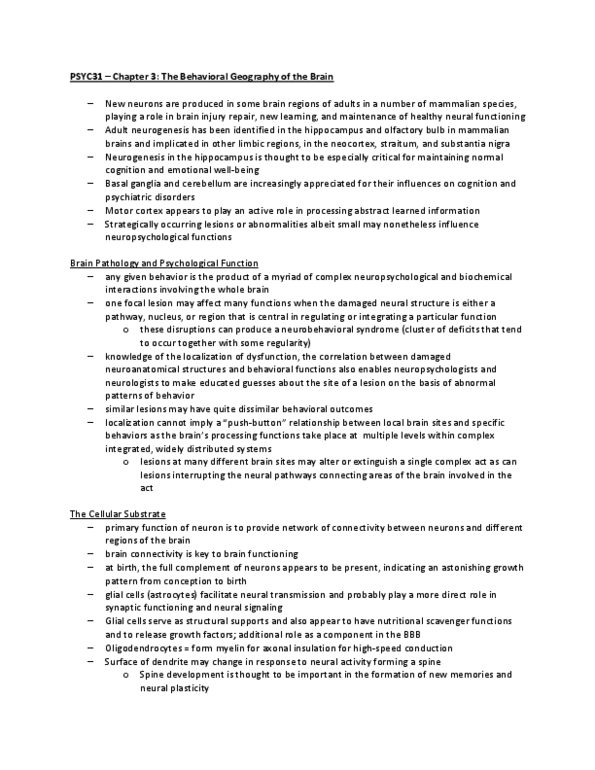
.()noise3$%))$
*%+-
()0(%"(
"
o8%(("*(%
)*%%)4+-0
%0()5-
'*%-
o")%0(%("
*(-
9:;

%"()()%
((""))
-
PARAMETRIC ADJUSTMENT: FEED FORWARD AND FEEDBACK
"")parametric feed-forward3(
)%*0%<%"
%-
o;)"% %"=
0))(%"
%(-
60(%"$parametric feedback.
o 4 " ( "5 "
))%0
1%1-
2+)1=-#%
"++-
!()/+4>5%)$-
o"(0%(
)?-
% @ 0 %
"(=+-
/+ < (
?(-
' % ( %
(,"
(-
;%)$%%"(%%)0)
)
oA%0-
o;%)$%(3))-
%)$)-
DIRECT FEEDBACK: GUIDED CONTROL
B:;
Document Summary
Makes the effects of stimulating a particular region of the motor system additionally complex; any movement that may result from it also generates new patterns of afferent activity. By acting on centres whose descending activity then influences that region, this messes things up by altering the pattern of stimulation we"re trying to apply. Much more can be discovered by studying complete systems with an output, compared with purely sensory systems. Feedback using info about results to improve performance. Motor systems are forced to act blindly sometimes lack normal sensory feedback: ex. Throwing orange peel in garbage can, rat building nest. How well this system works depends how good the controller is: the more it knows about how the plant will behave in response to a particular command the better it performs. It needs a library of motor programs suitable for different acts, where it can look up the rules needed to translate a certain desire into an appropriate command.