Psychology 2115A/B Lecture Notes - Lamellar Corpuscle, Haptic Perception, Somatosensory System

21 Apr 2013
School
Department
Course
Professor
Document Summary
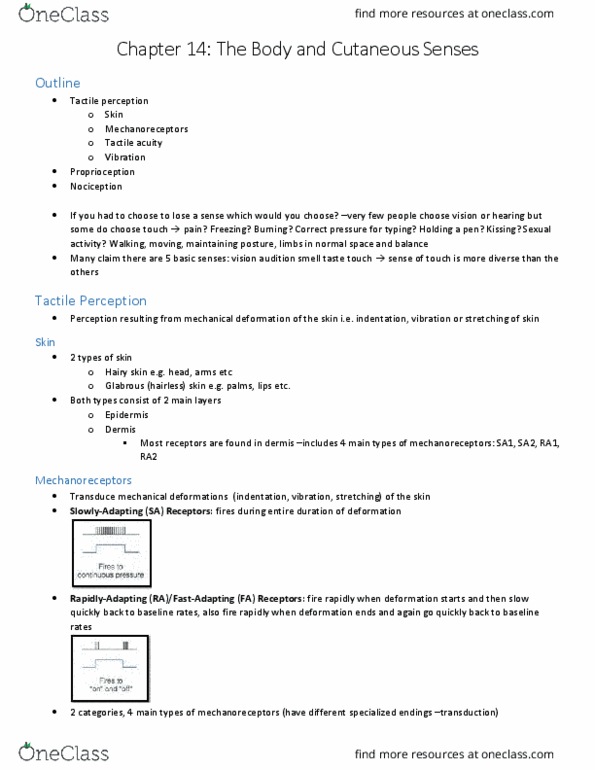
By the end of this section you should know: If you don t have these senses you would be severely disabled. Heaviest organ in the body: skin weighs approximately 20 pounds on average. Its role is to protect the inside parts of us by keeping damaging agents in the environment from penetrating our bodies. Epidermis: the outer layer we can see: made up of dead skin cells. Dermis: lies below the epidermis and contains all the receptor cells: mechanoreceptors: the receptor cells. Several types that respond to different stimulation. Merkel receptors: continuous firing receptors fire continuously as long as the stimulus is present, responsible for sensing fine detail, tend to resemble regular receptors. Meissner corpuscle: fire on/off detectors of when a stimulus is detected/removed, responsible for grip, tends to look like a bulb. Ruffini cylinder: responds continuously to stimulus, responsive to stretching of skin. Pacinian corpuscle: on/off receptor, responsible to vibrations and fine texture by moving fingers.